
Digital antenna TV has to have capable reception on TV Band Digital TV frequency , from 470-862 MHz.
We can design with Yagi model, Logarithmic antenna Design , Fractal Antenna design or other design that proven can receive with good quality on this band. with frequency reception, we can design this :
862 - 470 = 392 , 1/2 Lambda will be , 490 + 392/2 = 666 Mhz
For Yagi antenna , I use calculation design from K7MEM.com
Ads Link

or you can also get design from Su and Chang http://www.jpier.org/PIERL/pierl12/14.09102302.pdf
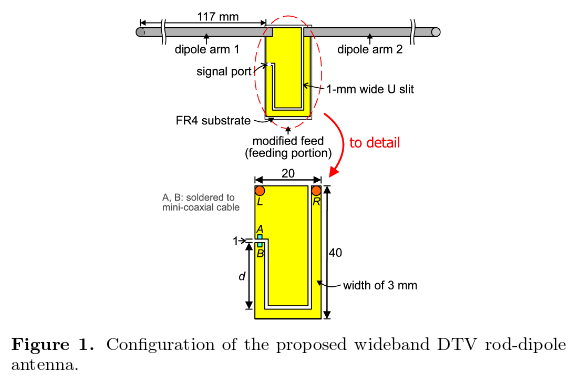

I have tried the Su and Chang design , with good reception at Digital Terrestrial TV Channel and average quality in analog TV channel reception.



 Our secondary mirror
assembly would occasionally jerk. So we constructed a system using
eight BMA180 accelerometers, each attached to an ARMWeb SBC.
Our secondary mirror
assembly would occasionally jerk. So we constructed a system using
eight BMA180 accelerometers, each attached to an ARMWeb SBC. 





 Our secondary mirror
assembly would occasionally jerk. So we constructed a system using
eight BMA180 accelerometers, each attached to an ARMWeb SBC.
Our secondary mirror
assembly would occasionally jerk. So we constructed a system using
eight BMA180 accelerometers, each attached to an ARMWeb SBC. 




